There are many ways to drive the motor. Our robot uses the most commonly used L298P solution.
L298P is an excellent high-power motor driver IC produced by STMicroelectronics. It can directly drive DC motors, two-phase and four-phase stepping motors. The driving current up to 2A, and output terminal of motor adopts eight high-speed Schottky diodes as protection.
We have designed the motor driver shield V2 based on the L298P circuit.
The stackable design can make it be plugged directly into the Arduino, reducing the technical difficulty of using and driving the motor.
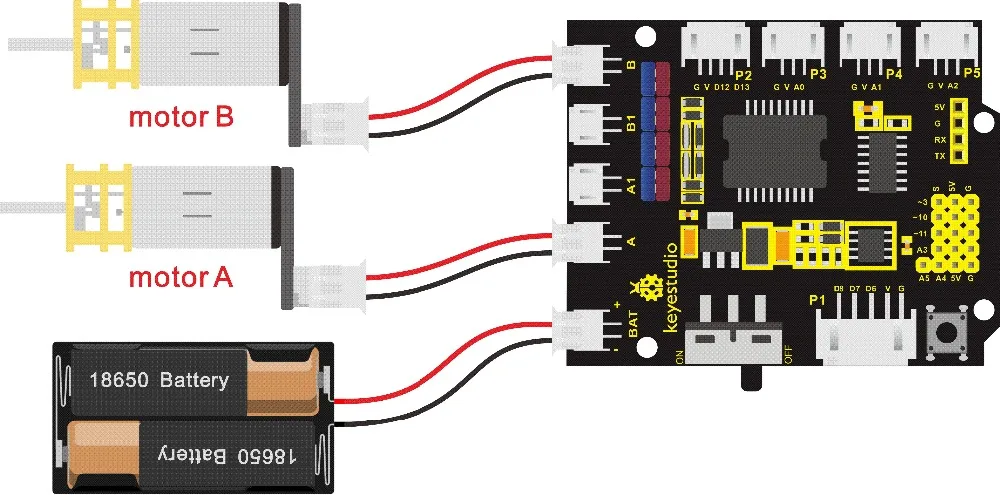
Direct stack the motor driver shield onto UNO R3 board, after the BAT is powered on, turn the Slide button ON, to supply the power for both keyestudio motor driver shield V2 and UNO R3 board.
For simple wiring, the motor driver shield comes with anti-reverse interfaces. When connecting the motor, power supply and sensor modules, you just need to plug in directly.
The Bluetooth interface on the motor driver shield is fully compatible with keyestudio HM-10 Bluetooth module. When connecting, just plug HM-10 Bluetooth module into the corresponding interface.
At the same time, the motor drive shield has brought out extra digital and analog ports in 2.54mm pin headers, so that you can continue to add other sensors for experiments extension.
The motor drive shield can access to 4 DC motors, defaulted by jumper connection. The motor connector A and A1, connector B and B1 are separately in parallel.
The 8 jumpers can be applied to control the turning direction of 4 motors.
For instance, if change the 2 jumpers near the motor A connector from horizontal connection to vertical connection, the turning direction of motor A is opposite to the original rotation direction.
Technical Details
Logic part input voltage: DC5V
Driving part input voltage: DC 7-12V
Logic part working current: <36mA
Driving part working current: <2A
Maximum power dissipation: 25W (T=75℃)
Working temperature: -25℃~+130℃
Dimensions: 66mm*55mm*18mm
Weight: 25.2g
Hookup Guide