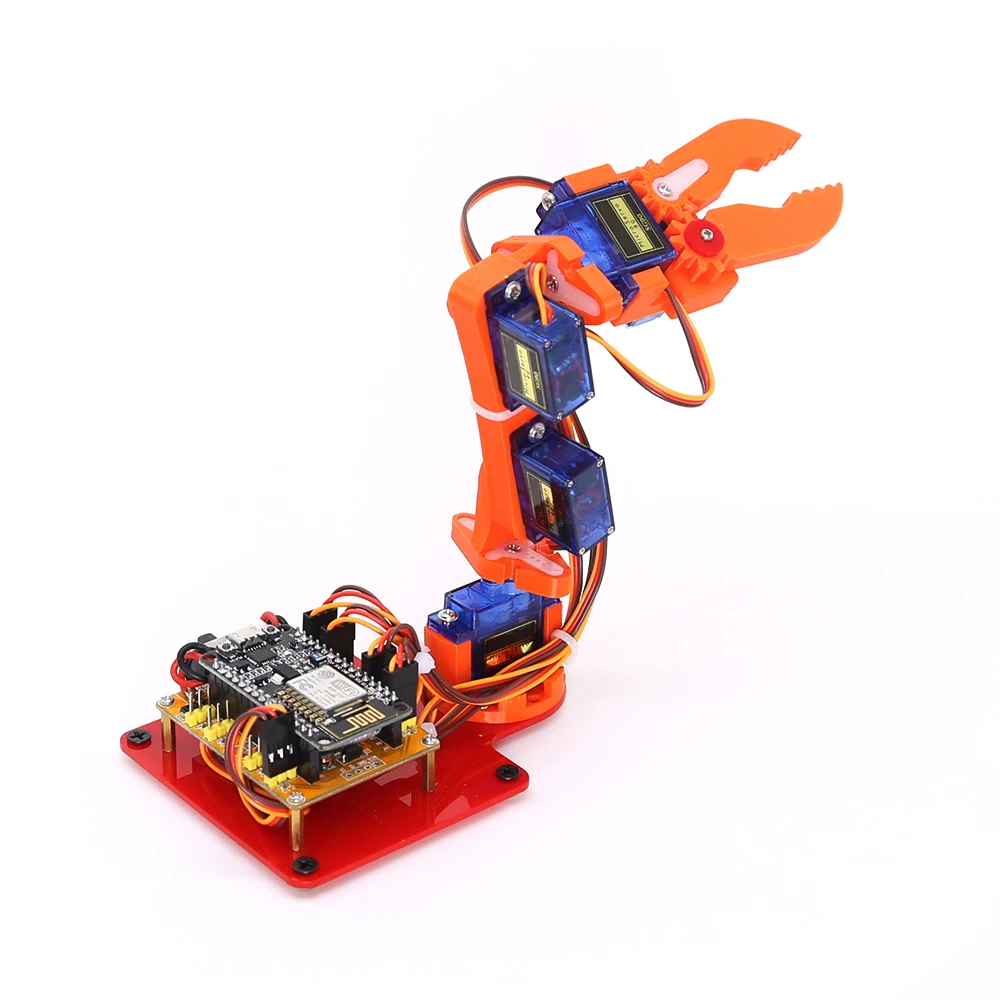
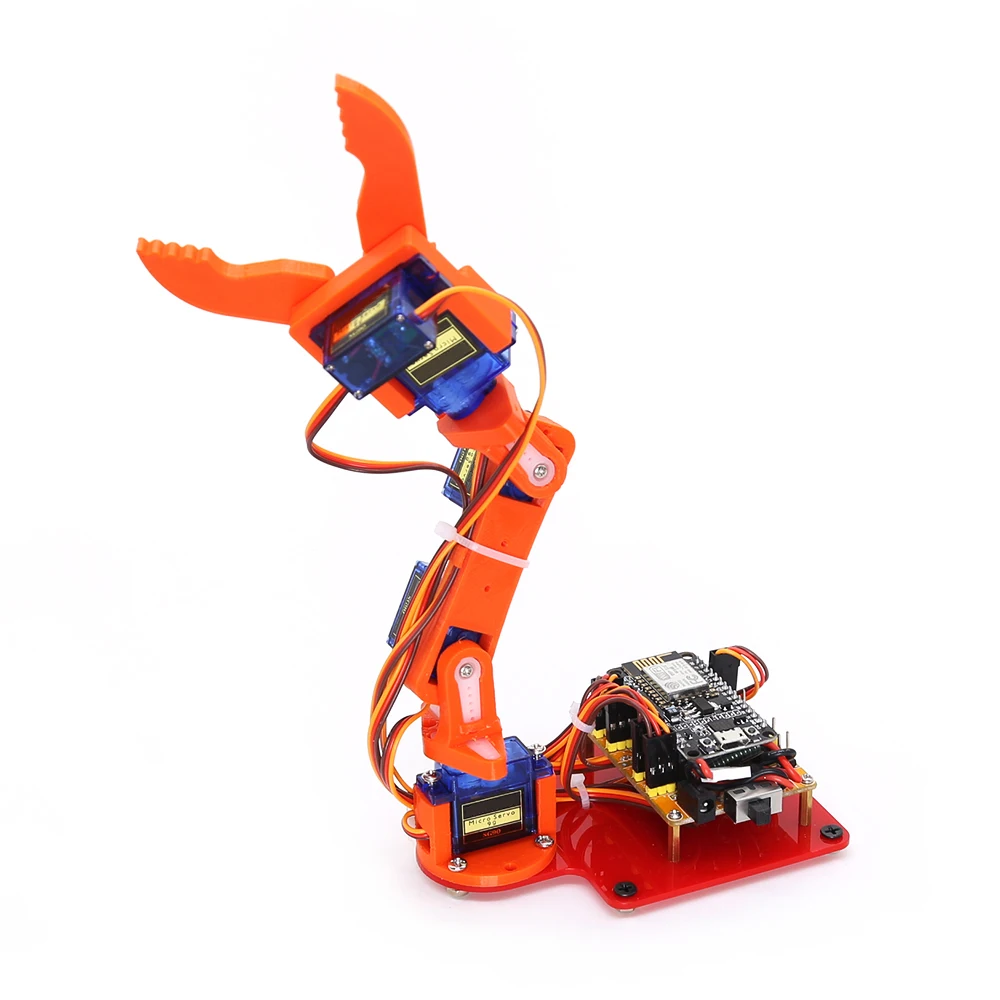
Introduction:
This is an interesting Arduino-based five-axis robotic arm DIY project, the main control board is NodeMCU. The product is a part and needs to be assembled by yourself.
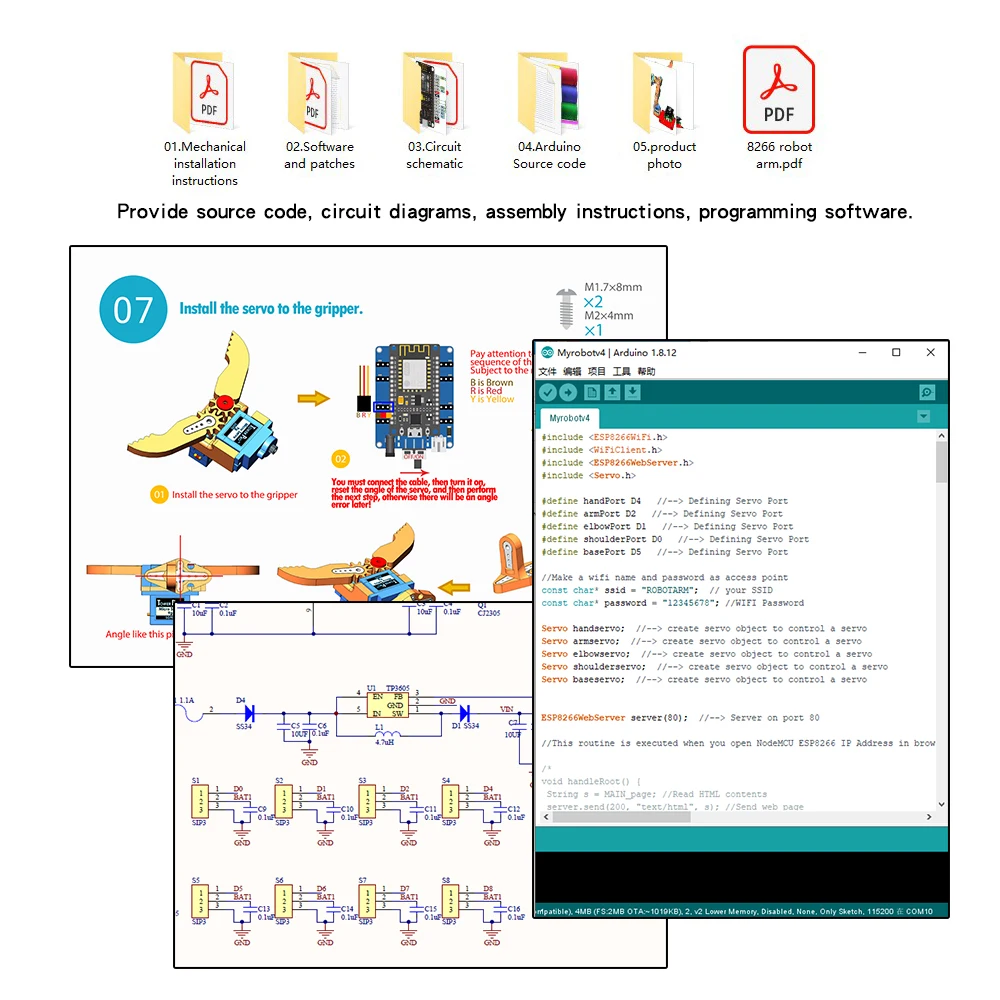
Before the work starts, we need to use a laptop, mobile phone, or other device to set up a WIFI hotspot according to the instructions. When the switch is turned on, the robotic arm will automatically connect to our hotspot, and then we can view the robotic arm through our computer or mobile phone. After specifying the IP address, enter the IP with a browser to open the control page, and control each joint through the slider control on the page. The advantage of this is that it can be cross-platform, no matter you are windows, linux, Android, or other systems, as long as you can create a custom hotspot and have a browser. you can control it. The code is open source, and you can modify it yourself if it doesn’t work.
The expansion board includes a charge and discharge protection circuit, which is easy to charge and use.
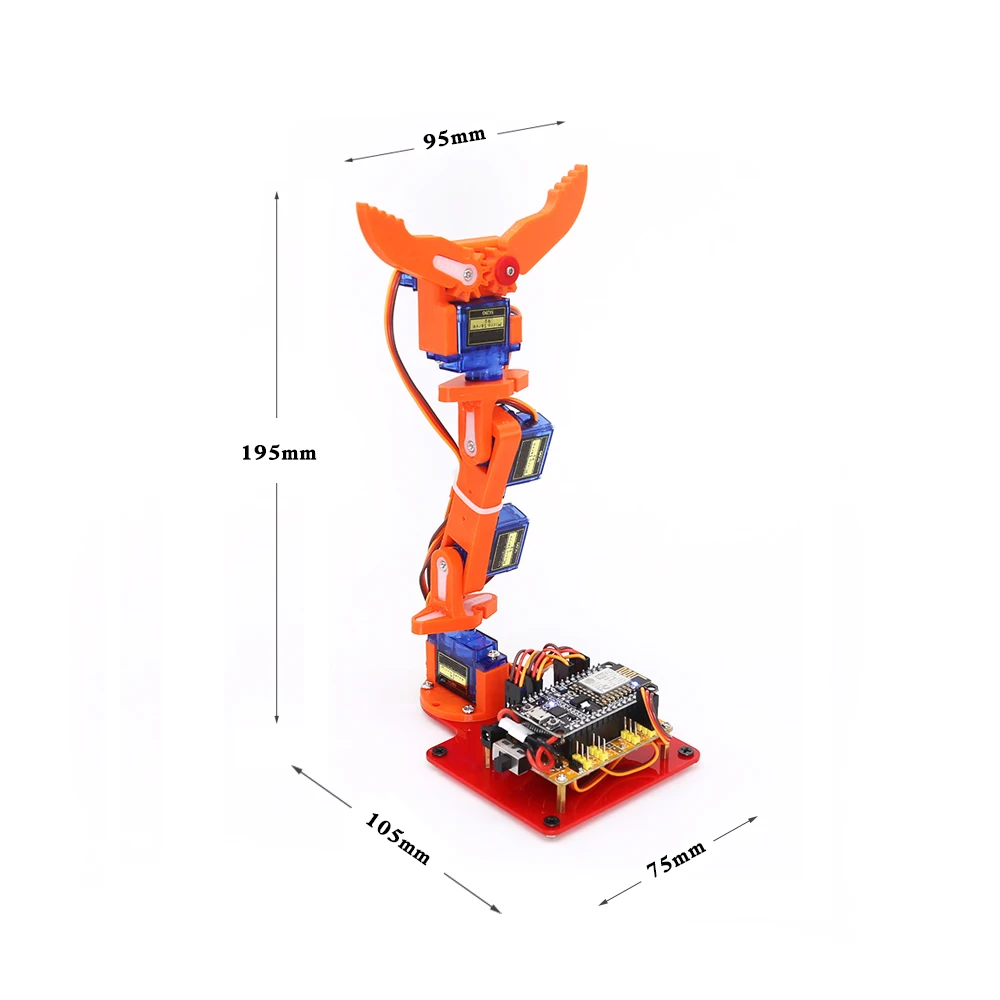
Size:
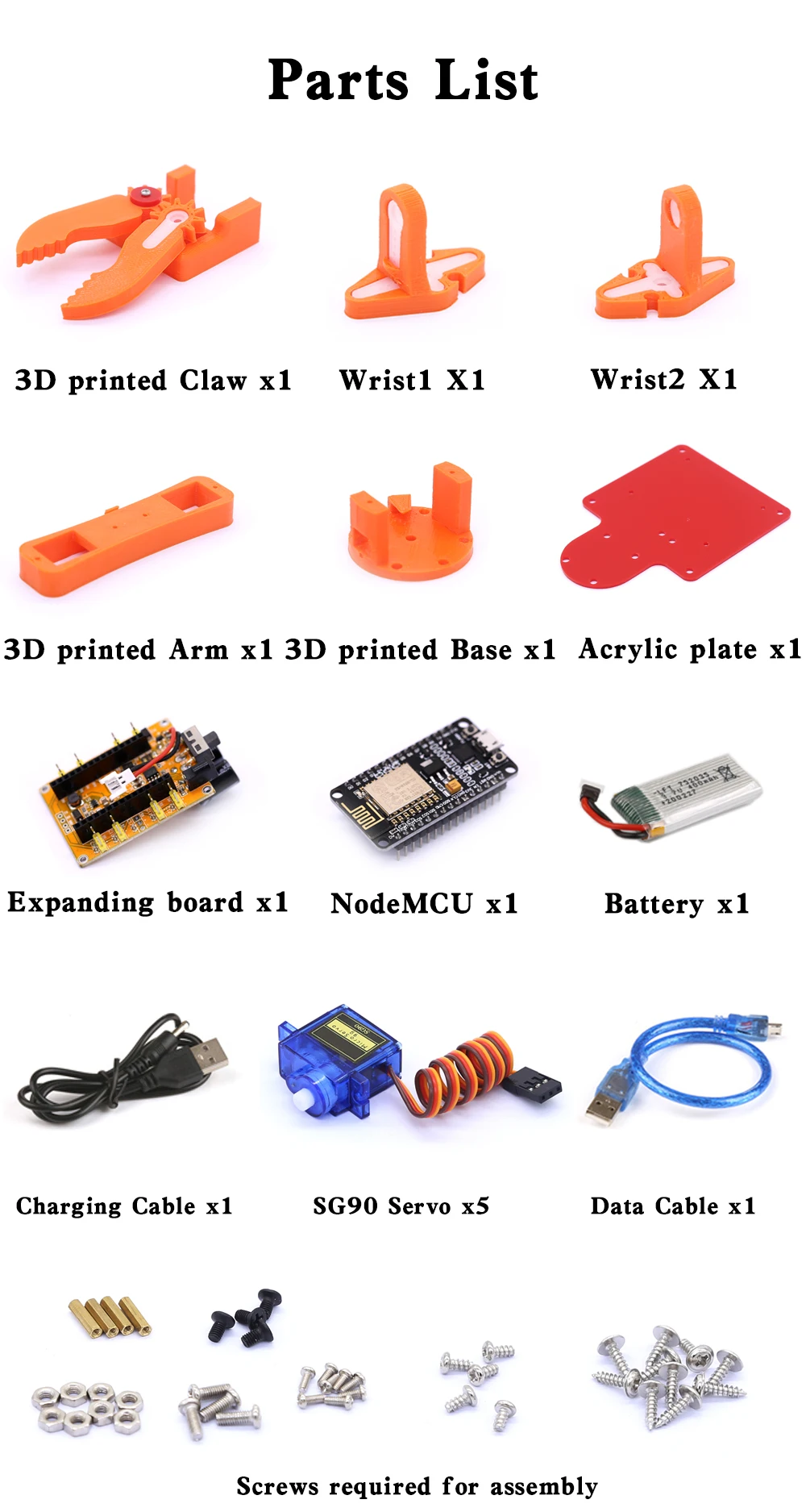
Shipping List:
Expansion board x1
NodeMCU x1
Battery x1
SG90 Servo x5
Charging cable x1
Data cable x1
Acrylic plate x1
3D printing mechanical claw x1
3D printed wrist x2
3D printing arm x1
3D printing base x1
Screws required for assembly
Development environment:
Arduino IDE.
Motherboard
NODEMCU(ESP8266).
Enjoy it: